Work carried out totgether with Omer Abdella.
The project is structured in literature review, paper validation and algorithm testing on new Data – including new data formats.
Purpose Statement and Introduction:
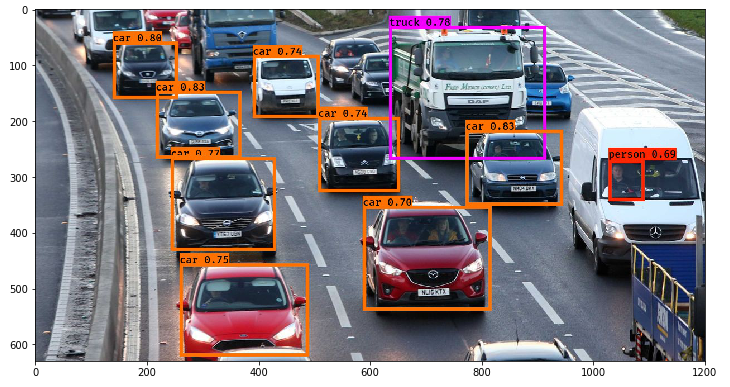
The aim of the project is to test the effectivness of a state-of-the-art visual detection and tracking algorithm on new data. In this project in specific, due to both my collegue Omer and my, interest, the detection model is focused on autonomous driving. The selected model is a YOLOv8 model trained on a custom data set. We aim to train the same model with a similar approach follwed in the work by Debasis Kumar and Naveed Muhammad[1], on image + Lidar data. Their work achives great performance on harsh climate conditions driving with just image data and the novel YOLOv8 model by ultralytics. We improve their results by adding depth information to the 2D images and analyze if the added computational and hardware complexity are justified.
Work is still on going…
Bibliography:
[1] Kumar, D.; Muhammad, N. Object Detection in Adverse Weather for Autonomous Driving through Data Merging and YOLOv8. Sensors 2023, 23, 8471. https://doi.org/10.3390/s23208471.

Leave a Reply